








Synapticon
offers the most compact, efficient and easy-to-use servo drives for distributed system architectures, providing unparalleled solutions for integrating drives into motion axes. Many of the most innovative manufacturers of robots and machines use Synapticon to realize better products faster and to work with a reliable and deeply supportive partner to achieve their most ambitious goals.
SOMANET servo drives from Synapticon: Integrated Motion for Robotics, Machine Building and Autonomous Industrial Systems.
is a combination of servo drive, position feedback sensor (encoder), mechanical integration solution, providing a pin brake and safe motion option, specifically designed for collaborative robot (cobot) joints and smart actuators.
is the world’s first Integrated Motion Device: a complete servo solution for robots and smart actuators that features:
Whether you are planning a collaborative robotic arm, a service robot or an automated logistics solution:With our compact and efficient, high-performance, decentral servo drives, OEMs such as robot manufacturers and machine builders can utilize Synapticon’s advanced motion control technology to realize better products inless time.
A perfect fit for your robot actuator with zero mess cabling. With their circular shape and hollow shaft they are ideal for fully integrated hollow-shaft actuators that are mainly used in robot arms.
Somanet circulo is available in different versions and with different options:

Safe Motion Module:
Option:
Cable:
SOMANET OBLAC Box
Evalution kit:
Servo drive commissioning software
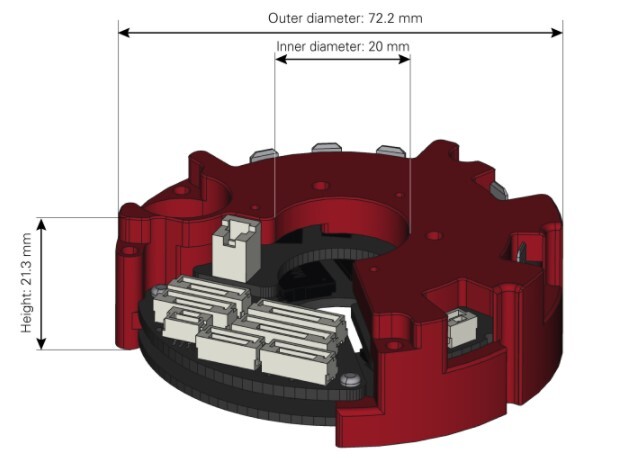
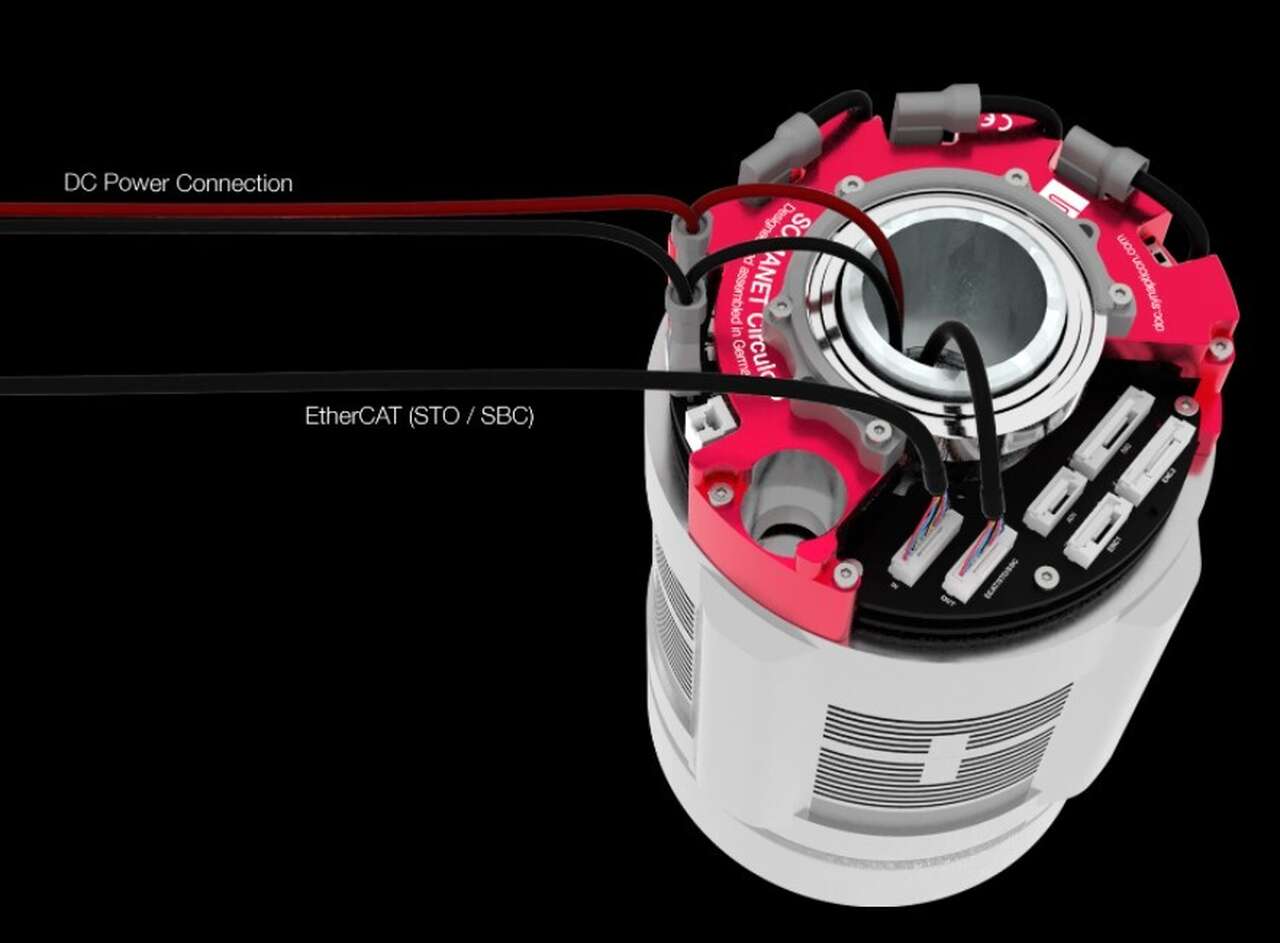
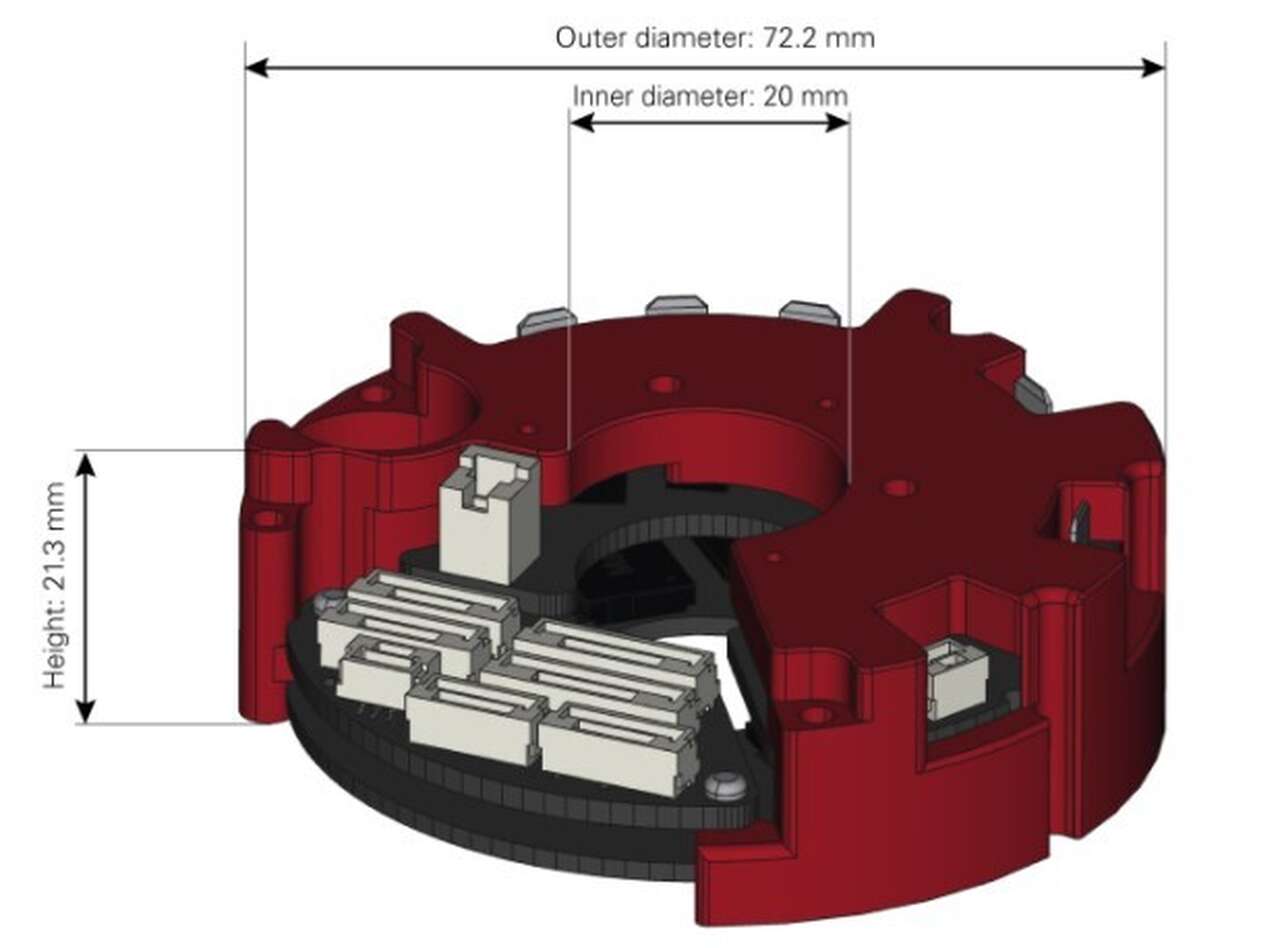
With its circular shape and hollow shaft with a diameter of 20 mm SOMANET Circulo 7 is ideal for a fully integrated Axis which are mainly used in Collaborative Robots. SOMANET Circulo servo drives can have up to two integrated absolute encoders (19 bits) with a battery-based multi-turn option which automatically calibrates. In addition, the nodes offer on-board safety features such as STO and SBC via a 24V I/O. Because the cable connections can easily be looped through, the wiring for EtherCAT, Logic Voltage, STO and SBC are extremely simple. In addition, there is an interface to external encoders for ABZ, SSI, BiSS-C and A-format. SOMANET Circulo also offers an interface and mechanical device for a Cobot-type locking brake and a motor temperature sensor (PT100, PT1000, KTY).
Power Specification SOMANET Circulo 7
SOMANET CIRCULO 7 + CIRCULO 9
| Communication Interface | EtherCAT, DS402, CoE, FoE, FSoE |
| Rated supply voltage DC | 24-48 V |
| Maximum voltage DC | 60 V |
| Continuous phase current RMS | Circulo 7: 8 Arms Circulo 9: 20 Arms |
| Maximum phase current RMS for more details please refer to our documentation | Circulo 7: 24 Arms Circulo 9: 60 Arms |
| Maximum efficiency | 99 % |
| Integrated absolute encoder (option) | Circulo 7: 2 x 19 bit (1 x multi-turn) Circulo 9: 2 x 20 bit (1 x multi-turn) |
| Supported motors | BLDC, PMSM |
| Hardware protections | Overcurrent, overvoltage,undervoltage, overtemperature, PWM deadtime, PWM shoot through |
| Sensors on-board | 3 x I_phase, U_DC, t_MOSFET, t_core |
| Encoder interface (ext.) | Port 1: SSI / BiSS-C Port 2: ABZ / SSI / BiSS-C / Nikon |
| Brake output | Nominal 1A @ 48V, peak 4A, pwm controlled |
| GPIO | 5x DIO(3.3/5V), 1x DO(3.3/5V), 1x DI(24V) 1x Analog In Single Ended (0-10V) 1x Analog In Differential (+-5V) |
| Heatsink | Aluminum, anodized, precision machined |
| Standard safety functions | STO / SBC according to SIL 3 PL-e |
| Safe Motion Module (optional) | FSoE, STO, SBC, SS1/2, SOS, SMS, 4xSLS, Safe Process Data (position, velocity), 1 x safe analog input, 2 x safe digital inputs, 1 x safe digital output (OSSD) |
| Integrated brake | Solenoid actuator for latching motor brake (optional) |
| Compliance with standards |
|
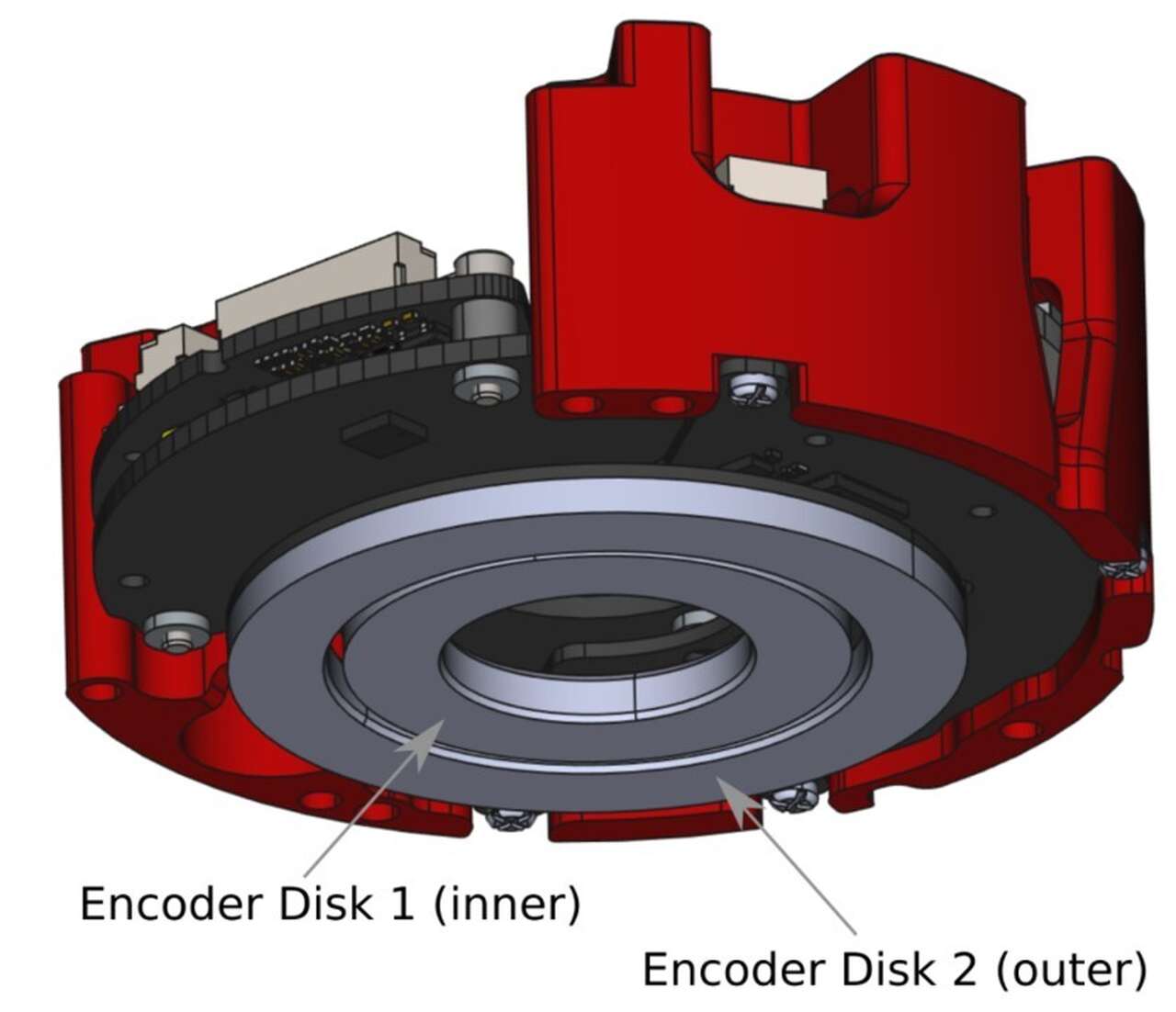
A DUAL HIGH RESOLUTION ABSOLUTE ENCODER
For the first time in a standard servo drive: Servo drive and position encoders work as one! Circulo features up to two integrated absolute encoders with no extra cables and no inconvenient encoder calibration tools.
Safe Motion Module for Circulo:
allows for SIL3 PL e level safe motion functions over FSoE (FailSafe over EtherCAT). Implement your application according to ISO/TS 15066.

We collected the following documentation as PDF-File, that you can access by clicking on the icons.
If you have searched for info but is not listed, or not completely answering your requirements, perhaps the document you are looking for is not public.
In that case, please contact us by using the following means: